
Schachgegner: angetrieben von vibrationsarmen Linearsystemen
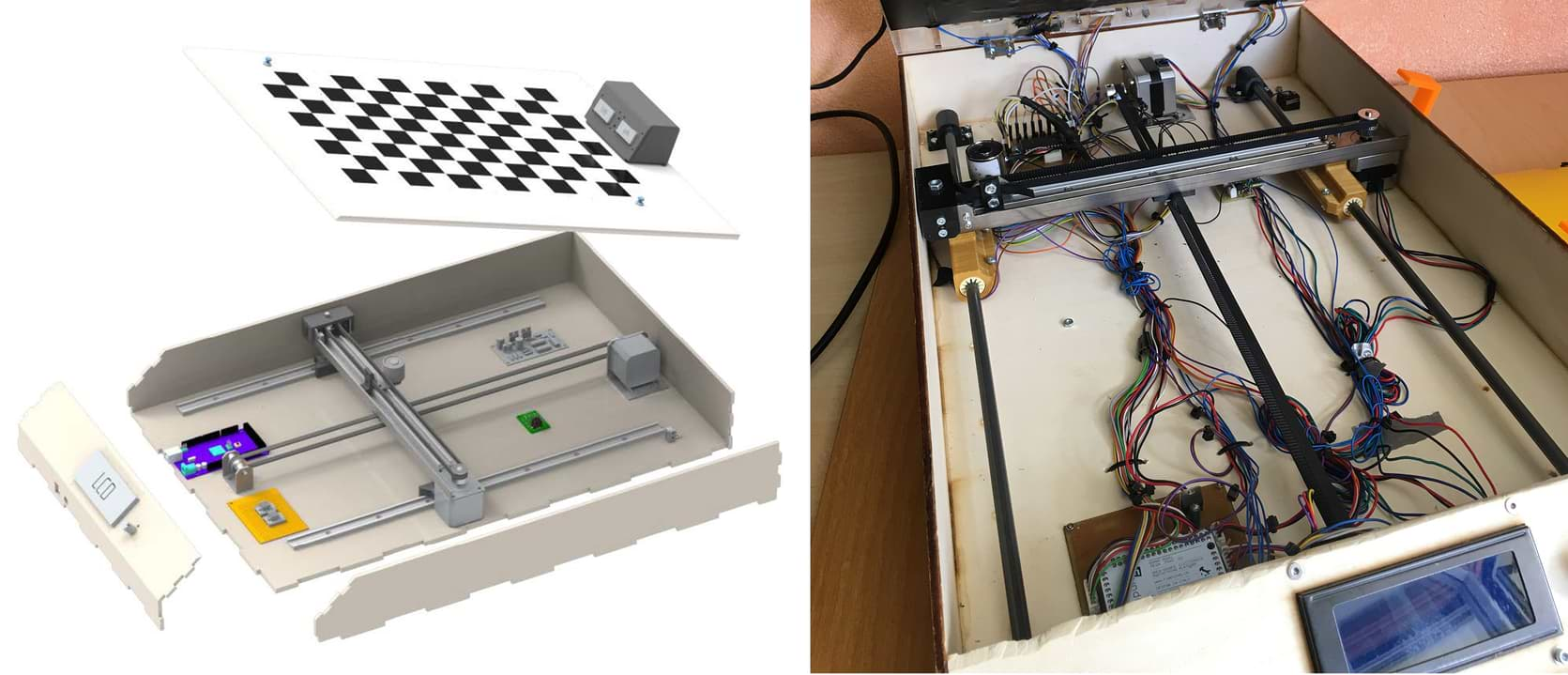
Der Schachsport ist einer der beliebtesten Kopfsportarten, der nicht nur zu zweit, sondern sogar auch alleine Spass machen kann. Mit dem «Chess Buddy» haben Sebastian Jahn und Julian Krydl im Rahmen ihrer Diplomarbeit eine neue Generation der Schachroboter entwickelt. Dieser reagiert auf die Züge des Gegenübers und verschiebt die Figuren ganz autonom. Das motorgetriebene Innenleben des Chess Buddys besteht dabei aus zwei Präzisions-Aluwellen auf denen schmierfreie Drylin R-Gleitlager einen Elektromagneten zur Positionierung der Spielfiguren leise und vibrationsarm gleiten lassen.
Beim Schach spielen sind immer zwei Spieler notwendig. Sollte gerade kein Partner zur Stelle sein, steht nun der Chess Buddy von Sebastian Jahn und Julian Krydl zur Verfügung. Im Rahmen ihrer Diplomarbeit am Linzer Technikum an der Lehranstalt für Mechatronik haben sie den Schachroboter entwickelt.
Ziel ihres Projektes war es eine Maschine zu konstruieren, die in der Lage ist Figuren auf einem Schachbrett selbst bewegen zu können, die Züge des menschlichen Spielers zu erkennen sowie falsche Züge zurückzusetzen. Sowohl die Entwicklung als auch die Konstruktion des Roboters übernahmen die Studenten selbst. Für das Design entschlossen sich die Ingenieure den Roboter unter dem Schachbrett agieren zu lassen.
Drylin Linearführung sorgen für Bewegungen von Geisterhand
Für die Umsetzung der Schachzüge wählten Julian Krydl und Sebastian Jahn magnetische Spielfiguren. Diese haben den Vorteil, dass sie durch einen Elektromagneten unter dem Schachbrett auf einem zweiachsigen Linearsystem positioniert werden können.
Nachdem zunächst Kugelumlaufführungen für das Linearsystem eingesetzt wurden, diese jedoch ein lautes Geräuschaufkommen verursachten, wandte sich Sebastian Jahn sich an den Young Engineers Support (yes) von Igus. Nach gemeinsamer Überlegung vor Ort mit dem Igus Aussendienst wurden zwei Präzisions-Aluminiumwellen mit Drylin RJMP Vollkunststofflager eingesetzt.
Diese sorgen durch ihre Schmiermittelfreiheit für einen leisen und sanften Lauf. Nema 17 Schrittmotoren sind für den Antrieb des Linearsystems verantwortlich. Um zu erkennen welchen Schachzug der Gegenüber gespielt hat, liest der Chess Buddy mittels Hallsensoren die Züge ein. Die Sensoren erkennen, ob ein Magnet am Feld platziert ist oder nicht und errechnen daraus den gefahrenen Zug. Die anschliessenden Schachzüge des Roboters werden daraufhin durch ein Computerprogramm gesteuert und durch das Linearsystem umgesetzt. Je nach Spielstärke des menschlichen Spielers, kann der Schwierigkeitsgrad des Roboters angepasst werden, sodass sich der Schachroboter perfekt als Trainingspartner eignet.
Impressum
Publiziert von Redaktion TuW (eua)
Bild: Igus Schweiz GmbH



Veröffentlicht am: