
Sicherer Einsatz der Mensch-Roboter-Kollaboration
4. Schunk Anwender- und Technologiedialog

Sicherer Einsatz der Mensch-Roboter-Kollaboration
4. Schunk Anwender- und Technologiedialog
In den kommenden Jahren dürfte der Anteil kollaborativer Roboter in der Produktion dynamisch wachsen. Entsprechend gross war das Interesse am 4. Schunk Anwender- und Technologiedialog zum Thema «MRK im Unternehmen sicher einsetzen».
Für Prof. Dr. Markus Glück, Chief Innovation Officer (CINO) bei Schunk, steht fest, dass das Co-acting, also die schutzzaunlose Interaktion mit dem Roboter unmittelbar vor dem Durchbruch steht. Haupttriebkräfte seien die ergonomische Entlastung, die Flexibilisierung von Arbeitsprozessen, Effizienzsteigerungen sowie die Ergänzung der Logistik, Beladung, Handhabung und Nachrüstung. «Es geht darum, die Stärken von Mensch und Roboter zusammenzuführen», betonte Glück. Geschwindigkeit, Kräfte, Wiederholgenauigkeiten und die hohe Qualität der Robotik sollen mit den menschlichen Stärken der Wahrnehmung, Improvisation, Reaktion und Adaption zu einer Synergie verschmelzen. Das Ziel: Automatisierung bei höchster Einsatzflexibilität.
Sorgfältige Prüfung im Vorfeld
Dabei verschweigt der Entwicklungschef nicht, dass gerade Erstprojekte mit einem nicht zu unterschätzenden Aufwand verbunden sind: «Übliche Amortisationszeiten unter 2 Jahren werden gerade am Anfang schwer zu erreichen sein», unterstreicht Glück und empfiehlt ein systematisches Vorgehen, indem zunächst die Eignung für den Einsatz der MRK anhand spezifischer Auswahlkriterien geprüft wird.
Dazu zählen unter anderem der Programmieraufwand beziehungsweise die Möglichkeit zur Bedienerführung, der Integrationsaufwand innerhalb der Prozesskette, die Möglichkeit, intuitiv zu trainieren, zu handhaben und zu quittieren, moderate Taktanforderungen sowie die Technikaffinität der Mitarbeiter. Zudem rät er zu einer betriebswirtschaftlichen Bewertung, die die Kosten der Roboterbeschaffung, Inbetriebnahme und Integration ebenso berücksichtigt wie Kosten für Sicherheitsvorkehrungen und Zertifizierung. Umgekehrt aber auch die Einsparungen infolge reduzierter Personalkosten und Produktivitätssteigerungen. Vor allem Erstprojekte sollten bewusst angegangen, mit Bedacht geplant und in einer eher geringen Komplexität realisiert werden.
Welche Möglichkeiten Schunk für die Peripherie von Cobots bietet, präsentierte Schunk-Produktmanager Benedikt Janssen. So wird mit dem Schunk Co-act EGL-C das bislang übliche Kraftlimit von 140 N bei kollaborativen Anwendungen durchbrochen. Ab Ende 2019 wird es erstmals möglich sein, Teile bis 8 kg im Formschluss kollaborativ zu handhaben. Eine intelligente Greifstrategie macht es möglich. Haupteinsatzfeld ist die unterstützende Handhabung zur Ergonomieentlastung.

Immer schneller zum CE-Zertifikat
Jochen Vetter, Teamleiter Robot Safety bei PILZ, gab einen Überblick über den normenkonformen Einsatz der MRK sowie über die verlässliche Messung von Krafteinwirkungen. Um MRK-Anwendungen sicher zu realisieren, seien sowohl hersteller- als auch betreiberseitig entsprechende Massnahmen erforderlich, angefangen bei einer kollisionsfreundlichen Umgebungsgestaltung über die funktionale Sicherheit bis hin zu einer umfassenden Benutzerinformation und -schulung.
Vetter machte deutlich, dass es in der MRK zu erheblichen Lerneffekten kommt: Während bei den ersten MRK-Applikationen noch eineinhalb Jahre bis zur CE-Kennzeichnung vergingen, liegt der Aufwand heute bei Erstkunden nur noch bei rund sechs Monaten, Folgeprojekte liessen sich sogar innerhalb von drei Monaten realisieren. Mit seiner Bestätigung auf der Konformitätserklärung übernehme PILZ einen wesentlichen Teil der Verantwortung, so Vetter.
Quick-Check vereinfacht Arbeitsplatzanalyse
Dr. Alfred Hypki, Oberingenieur am Lehrstuhl für Produktionssysteme der Ruhr-Universität Bochum stellte einen standardisierten Fragebogen vor, mit dessen Hilfe eine schnelle, objektive und belastbare Bewertung von MRK-Potenzialen in Unternehmen möglich ist. Innerhalb einer Stunde lässt sich mit dem Quick-Check ermitteln, ob eine Anwendung Potenziale für den MRK-Einsatz bietet.
Über eine Kombination der Prozesssimulationssoftware EMA zur Mensch-Prozess-Organisation mit dem Framework ROS sei es zudem gelungen, eine Bahnplanung mit dynamischen Hindernissen in Simulationsszenarien zu integrieren, so dass nun ganzheitliche Arbeitsplatzsimulationen von MRK-Szenarien möglich sind. Hypki appellierte, die beteiligten Disziplinen und Personen frühzeitig an den Entscheidungs- und Planungsprozessen zu beteiligen.
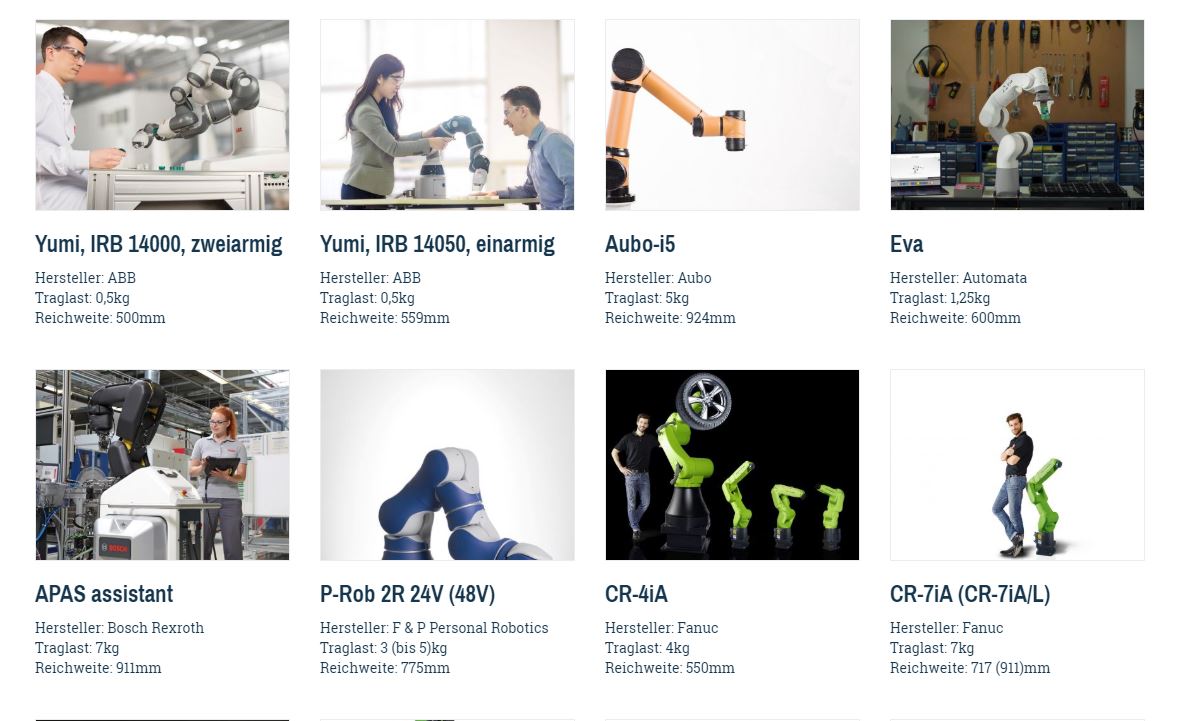
Eine Produktübersicht über eine Vielzahl an kollaborativen Robotern gibt es hier:
Automotive-Industrie als Vorreiter
Wie MRK im Produktionsalltag gelingt, präsentierte Dr. Sebastian Keller, Produktionsspezialist bei der BMW Group am Werk Leipzig. Das Spektrum reicht vom Auftragen von Scheibenklebstoffen, über robotergeführte Messmittel und Palettiersysteme bis hin zur Oberflächenreinigung in der Montage. Insgesamt 29 MRK-Applikationen habe die BMW Group bereits realisiert, vorrangig Anwendungen mit Leistungs- und Kraftbegrenzung.
Dabei konnte eine Reihe wesentlicher Erkenntnisse gesammelt werden: So lohne es sich, Anwendungen zu wählen, bei denen die Werker Vorteile unmittelbar erkennen und von ihnen profitieren. Zudem steigerten partizipative Entwicklungsansätze, bei denen die betroffenen Mitarbeiter frühzeitig einbezogen werden, die Akzeptanz und sie profitierten zugleich von den Ideen und dem Know-how der Mitarbeiter.
Bei Neuanlagen sei es darüber hinaus empfehlenswert, ausreichend Zeit für die Risikoanalyse sowie für die Umsetzung von Sicherheitskonzepten einzuplanen. Auch die Installation eines Kompetenzteams zum Auf- und Umbau von Anlagen vor Ort sei ratsam, so Keller.
Start-Ups versprechen hohe Entwicklungsdynamik
Das Kreativitätspotenzial und die Dynamik von Startups in der MRK vermittelte eindrucksvoll Dr. Jens Kotlarski, Geschäftsführer von Yuanda Robotics aus Hannover. Er sieht die Welt am Beginn eines goldenen Robotikzeitalters. Noch in diesem Jahr wird Yuanda Robotics einen neuartigen, kollaborativen Roboter auf den Markt bringen, der zertifizierte Sicherheit, gelenkintegrierte Drehmomentsensorik, integrierte Kameras, künstliche Intelligenz, eine grafische Bedienung sowie modulare Hard- und Software vereint.
Roboter für kollaborative Anwendungen sollen seiner Ansicht nach wie ein Power-Tool sein und eine begeisternde Bedienbarkeit gewährleisten. Vor allem die Interaktion mit dem Bediener will Yuanda auf eine neue Entwicklungsstufe heben. Das Ziel sei eine einfache Nutzbarkeit, beispielsweise über eine graphische Bedienoberfläche, eine intuitive Programmierung und eine einfache Einbindung von Vision-Systemen.
«Kollaborative Robotik ist viel mehr als sichere MRK», betont Kotlarski. Es gehe heute vor allem um Interaktion und Bedienbarkeit. Nach vorne betrachtet sieht er eine automatische Objekterkennung als Ziel mit sicheren Kameras und sicheren Netzwerken im Hintergrund inklusive Nutzung digitaler Zwillinge und einer automatisierten Bahnplanung.

Schlüsselfertige Cobot-Lösungen
Wie sich MRK-Szenarien konkret realisieren lassen zeigte Uwe Schmidt, Leiter der Division COBOT World von der HLS Ingenieurbüro GmbH aus Augsburg. Als Integrator entwickelt das Unternehmen zertifizierte Cobot-Lösungen beispielsweise für die automatisierte Beladung von Werkzeugmaschinen und nutzt dafür unterschiedliche Plattformen und Ausbaustufen. Auch aus seiner Sicht gewinnt das Thema der Simulation von Arbeitsräumen für die MRK an Bedeutung.
Dirk Garzke, Funktionsbereichsleiter Automation bei ZOLLER wiederum präsentierte MRK-Lösungen im Bereich des Werkzeugmanagements. Für den Erfolg sei nicht nur eine Datendurchgängigkeit innerhalb des Gesamtprozesses vom Toolmanagement über die Lager- und Logistiksysteme bis zur Werkzeugmaschine entscheidend, sondern auch weiche Faktoren, wie etwa der Name des Cobot-Systems, um die Akzeptanz zu steigern. So habe sich Zoller ganz bewusst für den Namen «Cora» entschieden.
Praxisrundgang mit Live-Vorführungen
In einem Stationenrundgang konnten die Besucher des Anwender- und Technikdialogs live erleben, wie vielfältig die Konzepte und Lösungen für die MRK bereits sind. Gezeigt wurden unterschiedliche Prüf- und Montageanwendungen, kollaboratives Pick & Place, aber auch Lösungen zur kollaborativen Werkzeugeinstellung und -bereitstellung.
Dabei wurde deutlich, dass mittlerweile eine enorme Auswahl unterschiedlicher Cobot-Systeme angeboten wird mit jeweils individuellen Stärken und Möglichkeiten. Und auch die Peripherie wächst unaufhörlich: Bis Jahresende wird Schunk ein ganzes Portfolio zertifizierter Co-act Greifer anbieten für unterschiedlichste Schnittstellen und Anwendungen. Dabei wandert immer mehr Intelligenz unmittelbar in die Komponente.
Umfrage unter den Teilnehmern
Eine Blitzumfrage unter den Teilnehmenden des Anwender- und Technologiedialogs zeigt, dass das Thema MRK im Fokus der Anwender angekommen ist. Rund 50 MRK-Anwendungen wurden insgesamt benannt. Rund ein Drittel der MRK-Community hat bereits an Pilotanwendungen Erfahrung gesammelt und geht aus der Evaluierungsphase über zur Einführung der Technologie an ausgewählten Einsatzorten der realen Produktion. Die Präferenz liegt vor allem bei Robotern von Universal Robots und KUKA, aber auch Cobots anderer Hersteller stossen auf grosses Interesse. Hauptanwendungsfelder sind die Übernahme von Pick & Place-Aufgaben, die Assistenz in Montageanwendungen sowie die betriebsinterne Logistik.

Impressum
Textquelle: Schunk
Bildquelle: Schunk
Publiziert von Technik und Wissen
Informationen



Veröffentlicht am: